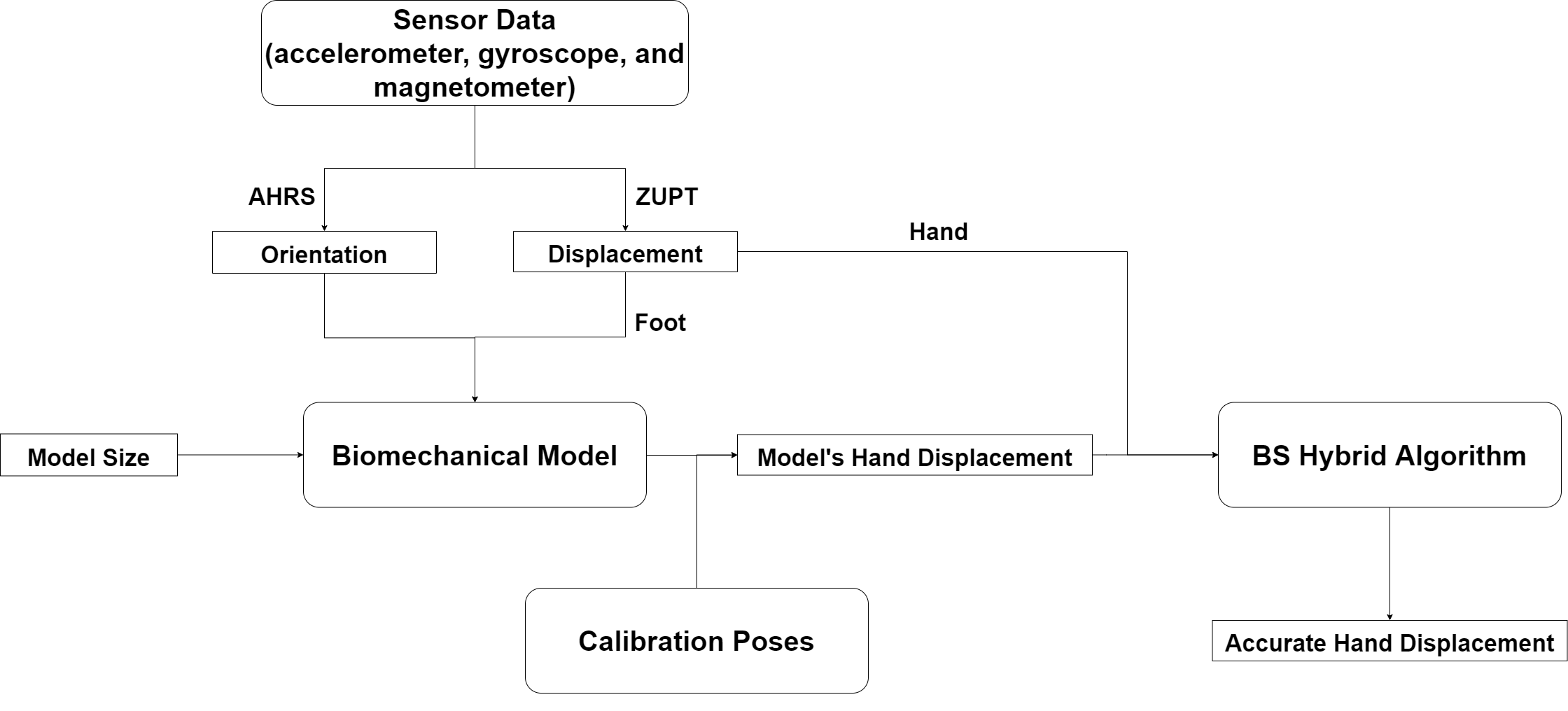
 System flowchart
System flowchart
ABSTRACT:
In recent years, with the advancement of technologies such as the Internet of Things and micro-sensors, inertial sensor motion capture systems that are small in size, inexpensive, unlimited movement space, and no occlusion problems have become more and more popular. However, the displacement estimated from the inertial sensors will become increasingly inaccurate as error accumulates. Therefore, how to correct or suppress the accumulation of errors, long-term use of inertial sensors has become an important issue. We aim to develop an innovative motion capture algorithm for wearable inertial sensors. Our algorithm captures motion data through 14 nine-axis inertial sensors, and estimates the displacement of each key parts of human body based on biomechanical model. We also designed 4 calibration poses to improve the accuracy of spatial positioning. We additionally present a Biomechanical-Sensor (BS) hybrid algorithm that combines the sensor trajectory with the final position point of the biomechanical model to compensate for the displacement error of the final position point. Such error is caused by the accumulation of sensor errors along with the biomechanical model trajectory error caused by human soft tissue. In this study, the subjects wore the devices from optical system and inertial sensor system at the same time and performed motions. The two systems separately estimate the displacement of each part of the human body. Usvally the optical system data is an order of maqnitude more accurate than that of inertial sensor data. We use optical system data as the standard to verify that our algorithm can effectively improve the estimated displacement accuracy using inertial sensors.
SUMMARY (中文總結):
近年來隨著物聯網(Internet of Things)、微型傳感器等技術的進步,體積較小、價格便宜、運動空間較不受限、無遮蔽問題的慣性傳感器動態捕捉系統則越來越受到歡迎。但由於慣性傳感器原始數據所估算的位移,會隨著誤差的累積越來越不精準。所以如何修正或抑制其誤差的累積,長時間的使用慣性傳感器成為了一個重要的課題。
我們提出一種基於可穿戴式慣性傳感器估計人體位移的動態捕捉方法,該算法透過配戴14個九軸慣性傳感器捕捉人體各部位的運動資訊,使用生物力學模型估算人體位移。並且我們設計了4個校正姿勢,以提升空間中定位的精準度。我們額外提出一種融合算法,將傳感器軌跡與模型直線距離進行結合,以彌補傳感器誤差累積所造成的最終位置誤差誤差以及受人體軟組織所造成的模型軌跡誤差,計算出更加準確的空間位移。最後本研究會同時讓使用者穿戴光學式系統與慣性傳感器系統進行動作,兩套系統分別估算出人體各個部位的位移,我們以精準度有一個數量級以上差距的光學式系統數據為標準,來驗證我們的方法能夠有效提升估算的位移準確度。
PROJECT MATERIAL:
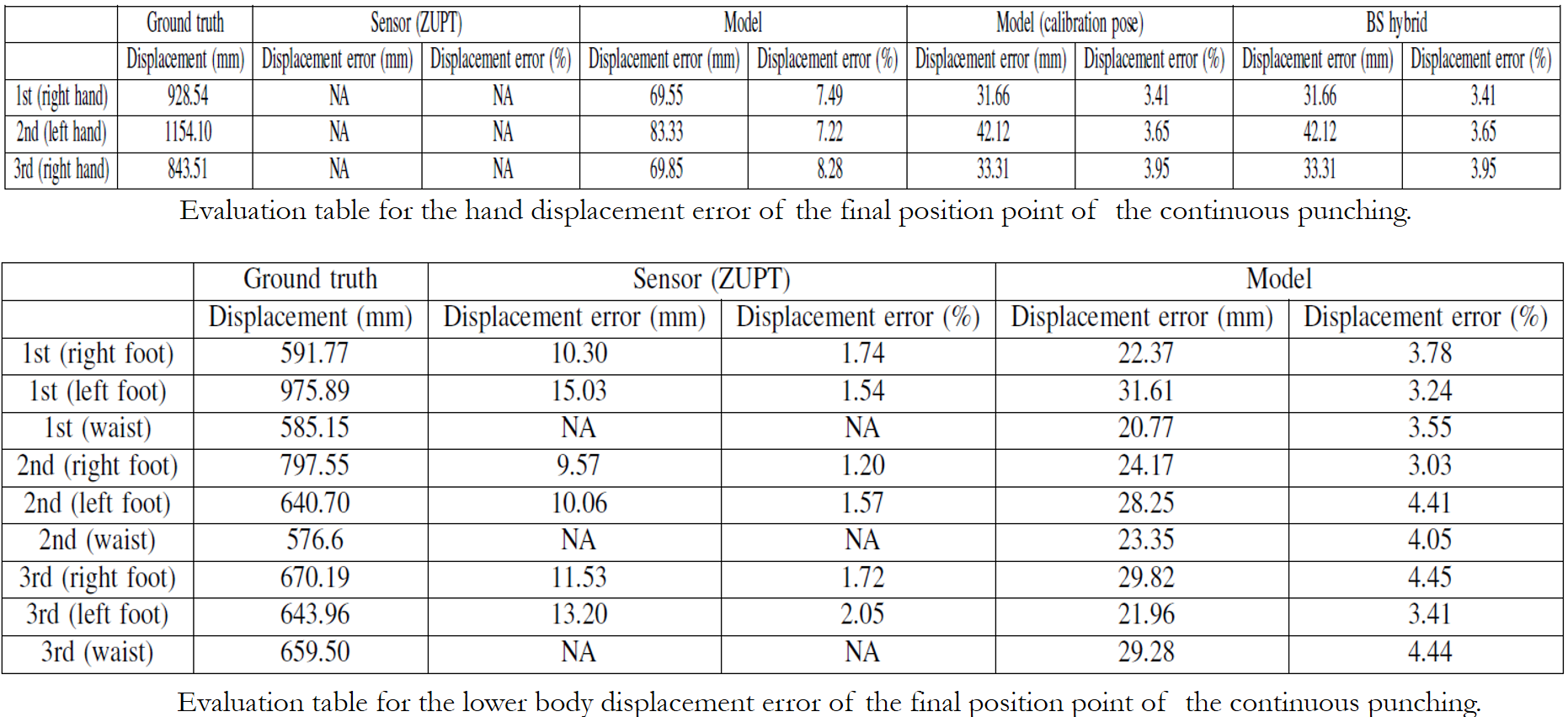
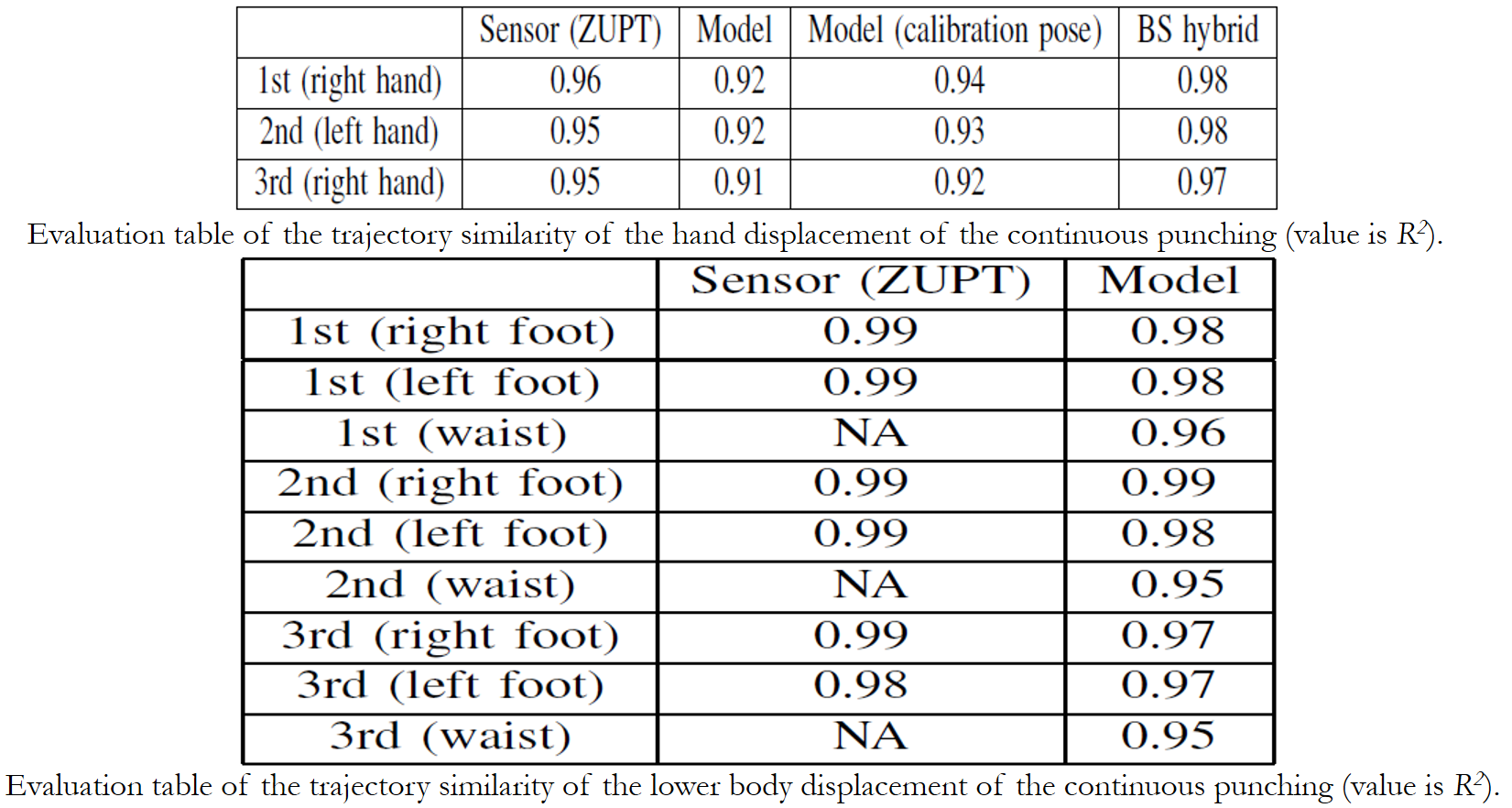
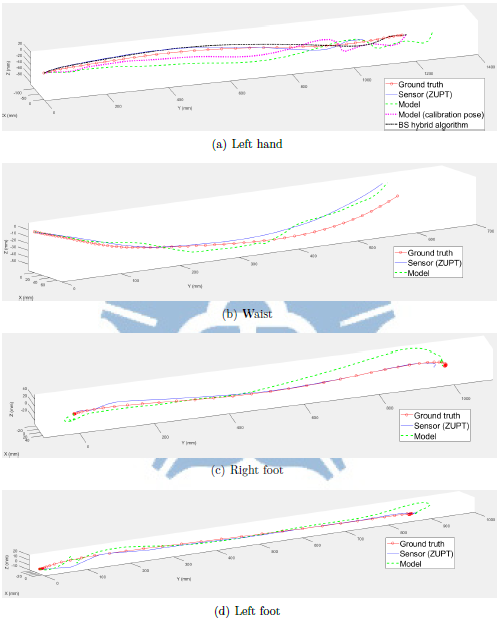
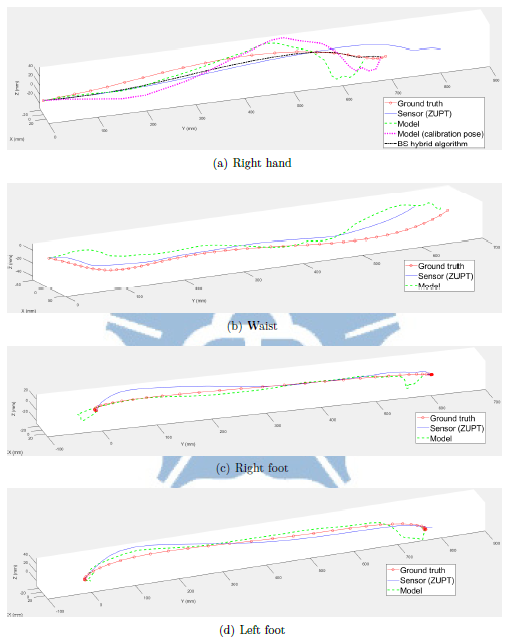
- The motion of continuous punching
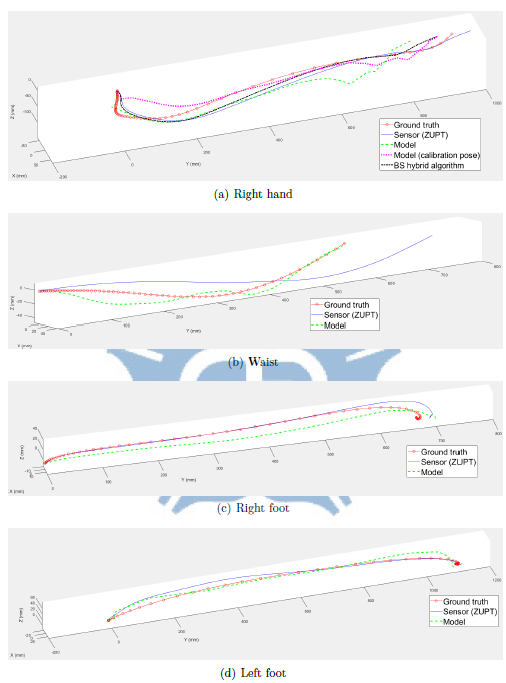 Displacement trajectory diagram of first punching of continuous punching.
Displacement trajectory diagram of first punching of continuous punching.
 Displacement trajectory diagram of second punching of continuous punching.
Displacement trajectory diagram of second punching of continuous punching.
 Displacement trajectory diagram of third punching of continuous punching.
Displacement trajectory diagram of third punching of continuous punching.